(!) Since support from Microsoft will end on January 14th, 2020, Windows 7 will be excluded from the recommended environment from December 15th, 2019 on this site. Vì lý do Microsoft kết thúc hỗ trợ cho Windows 7 vào ngày 14/01/2020, Windows 7 sẽ là hệ điều hành không được khuyến khích sử dụng với trang web này từ ngày 15/12/2019.
Search by Category / Brand Tìm theo danh mục, nhãn hiệu
Search by Category Tìm theo danh mục
- [Thông báo] Cập nhật địa chỉ kho tập kết hàng hóa tại khu vực miền Nam của MISUMI Việt Nam. Xem chi tiết.
[Announcement] Update on warehouse address in the Southern region of MISUIMI Vietnam. See more. - [Cảnh Báo] Thủ Đoạn Lừa Đảo Từ Nhân Viên Giao Hàng – Yêu Cầu Trả Phí Ship. Xem chi tiết.
[Warning] Fraud Calling from Shipper - Asking to Pay Shipping Fee. See more.
Specification/DimensionsĐặc điểm kỹ thuật / Kích thướcĐặc điểm kỹ thuật / Kích thước
-
type
- LEHF10
- LEHF20
- LEHF32
- LEHF40
-
Dimensions when open(mm)
-
Maximum Gripping Force (Opening Side, Electric Type)(N)
-
Maximum Gripping Force (Closing Side, Electric Type)(N)
-
Size
- 10
- 20
- 32
- 40
-
Stroke(mm)
-
Motor cable entry direction
- Entry on the left side
- Entry on the right side
-
Actuator cable type
- None
- Robot cable
- Standard cable
-
Actuator cable length
- 1.5 m
- 3 m
- 5 m
- 8 m
- 10 m
- 15 m
- 20 m
- None
-
Controller / driver type
- CC-Link direct input type
- NPN programless type
- NPN pulse input type
- NPN step data input type
- None
- PNP programless type
- PNP pulse input type
- PNP step data input type
-
I/O cable length
- 1.5 m
- 3 m
- 5 m
- None
-
Controller/driver mounting method
- DIN rail mounting
- Screw mounting
-
Communications plug
- None
- Straight-type communication plug connector
- T-branch-type communication plug connector
-
CADCAD
- 2D
- 3D
Days to ShipSố ngày giao hàng
-
- Alltất cả các
- 32 Day(s) or Less
- 37 Day(s) or Less
- 42 Day(s) or Less
Specify AlterationsChỉ định thay đổi
Electric Gripper, 2-Finger Type, LEHF Series (LEHF10K2-16-R8MJTD)

Copy Part Number URL to Clipboard
The part number URL has been copied into your clipboard.-
- Order Qty :
-
-
- Price :
- ---
-
- Total Price :
- ---
-
- Days to ship :
- ---
Select part number to Order Now/ Add to Cart
(i)
Caution
thận trọng
- Product images are representative images. CAD data is not supported for some model numbers.
Product Description
Electric gripper for a variety of workpieces with a long stroke.
[Features]
· Step motor (servo 24 V DC).
· Easy to complete setup with 2 items, namely, position and thrust.
· Controllers are shipped with the setup for actuator specifications (the actuator and controller are sold as a package).
· With drop prevention function.
· Self-lock mechanism reduces power consumption.
· With gripping check function.
· Possible to set position, speed and force (64 points).
*Values inside parentheses () are for long stroke.
LEHF Series 2-Finger Type Electric Gripper Specifications

LEHF Series 2-Finger Type Electric Gripper external appearance
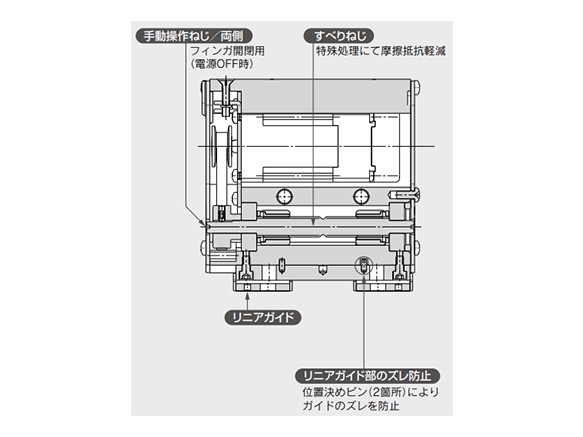
Features of LEHF Series 2-Finger Type Electric Gripper
Specifications
| Model | LEHF10 | LEHF20 | LEHF32 | LEHF40 | ||
|---|---|---|---|---|---|---|
| Actuator specifications | Open and close stroke / both sides (mm) | Basic | 16 | 24 | 32 | 40 |
| Long stroke | 32 | 48 | 64 | 80 | ||
| Lead (mm) | 40/15 (2.667) | 50/15 (3.333) | 70/16 (4.375) | 70/16 (4.375) | ||
| Gripping force (N)*1 *3 | 3 to 7 | 11 to 28 | 48 to 120 | 72 to 180 | ||
| Open and close speed / pushing speed (mm/s)*2 *3 | 5 to 80 / 5 to 20 | 5 to 100 / 5 to 30 | ||||
| Actuation type | Slide screw + belt | |||||
| Finger guide type | Linear guide (no circulation) | |||||
| Repeated length measurement accuracy (mm)*4 | ±0.05 | |||||
| Finger backlash / one side (mm)*5 | 0.5 or less | |||||
| Repeatability (mm)*6 | ±0.05 | |||||
| Positioning repeatability / one side (mm) | ±0.1 | |||||
| Lost motion / one side (mm)*7 | 0.3 or less | |||||
| Impact/vibration resistance (m/s2)*8 | 150/30 | |||||
| Max. operating frequency (C.P.M) | 60 | |||||
| Operating temp. range (°C) | 5 to 40 | |||||
| Operating humidity range (%RH) | 90 or less (no condensation) | |||||
| Weight (g) | Basic | 340 | 610 | 1,625 | 1,980 | |
| Long stroke | 370 | 750 | 1,970 | 2,500 | ||
| Electric specifications | Motor size | □20 | □28 | □42 | ||
| Motor type | Step motor (servo 24 V DC) | |||||
| Encoder | Incremental A/B phase (800 pulse/rotation) | |||||
| Rated voltage (V) | 24 V DC ±10% | |||||
| Power consumption / standby power consumption when operating (W)*9 | 11/7 | 28/15 | 34/13 | 36/13 | ||
| Max. instantaneous power consumption (W)*10 | 19 | 51 | 57 | 61 | ||
*1 Gripping force should be from 10 to 20 times the workpiece weight. Moving force should be 150% when releasing the workpiece. Gripping force accuracy should be: LEHF10: ±30% (F.S.), LEHF20: ±25% (F.S.), LEHF32/LEHF40: ±20% (F.S.). Gripping the workpiece with a heavy attachment and fast pushing speed may not satisfy the product specifications. In this case, decrease the weight and lower the pushing speed.
*2 Pushing speed should be set within the range during pushing (gripping) operation. Otherwise, it may cause malfunction. The open/close speed and pushing speed are for both fingers. The speed for one finger is 1/2 this value.
*3 The speed and force may change depending on the cable length, load, mounting conditions, etc. Furthermore, if the cable length exceeds 5 m, then the speed and force will decrease by up to 10% for each 5 m. (At 15 m: reduced by up to 20%)
*4 Repeated length measurement accuracy means dispersion (value on the controller monitor) when the workpiece is repeatedly held in the same position.
*5 There is no effect on the backlash during pushing (gripping). Make the stroke longer by the amount of backlash when opening.
*6 Repeatability means the variation of the gripping position (workpiece position) when the gripping operation is repeatedly performed in the same sequence for the same workpiece.
*7 A reference value for correcting an error in reciprocal operation which occurs during the positioning operation.
*8 Impact resistance: No malfunction occurred when the slide table was tested with a drop tester in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the gripper in the initial state.) Vibration resistance: No malfunction occurred in a test ranging from 45 to 2,000 Hz. Test was performed in both an axial direction and a perpendicular direction to the lead screw. (Test was performed with the actuator in the initial state.)
*9 The power consumption (including the controller) is for when the actuator is operating. The standby power consumption when operating is for when the gripper is stopped in the set position during operation (including energy-saving mode when gripping).
*10 The maximum instantaneous power consumption (including the controller) is for when the actuator is operating. This value can be used for the selection of the power supply.
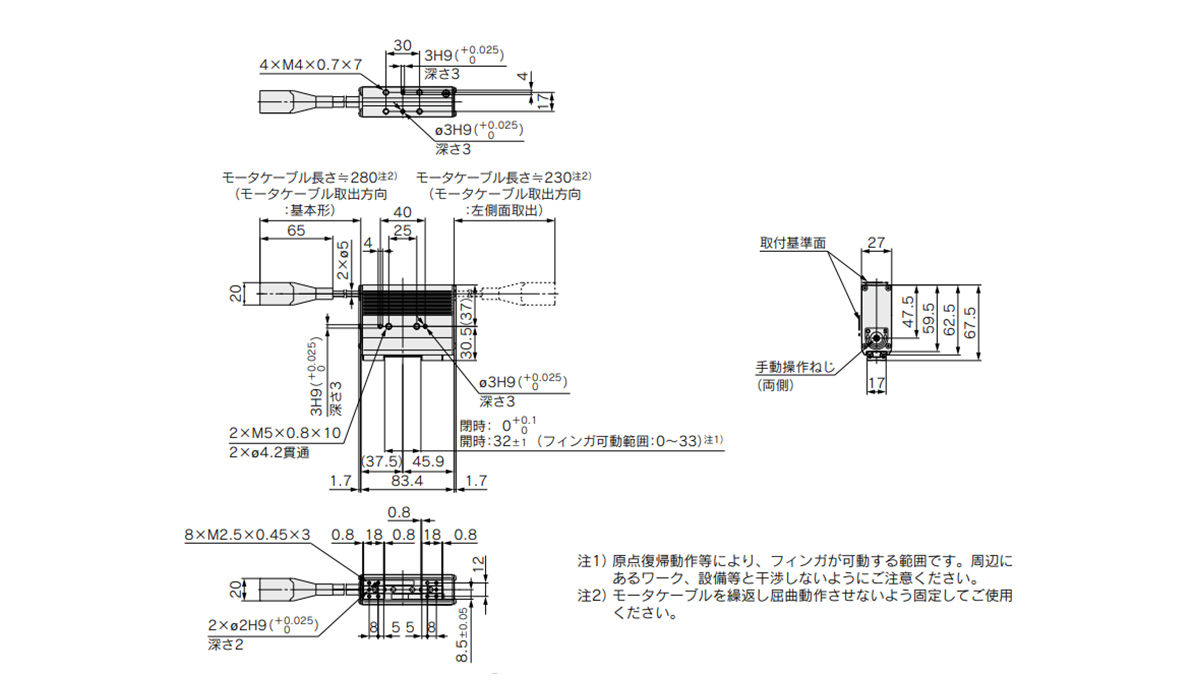
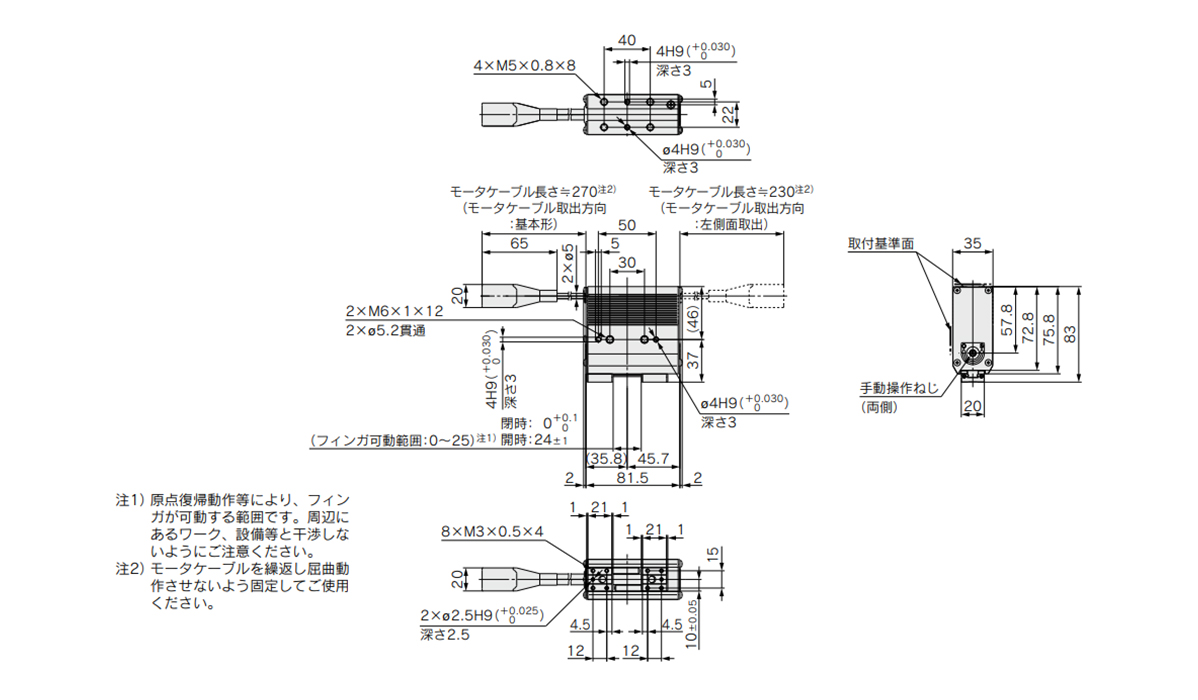
External dimensional drawing
(Unit: mm)
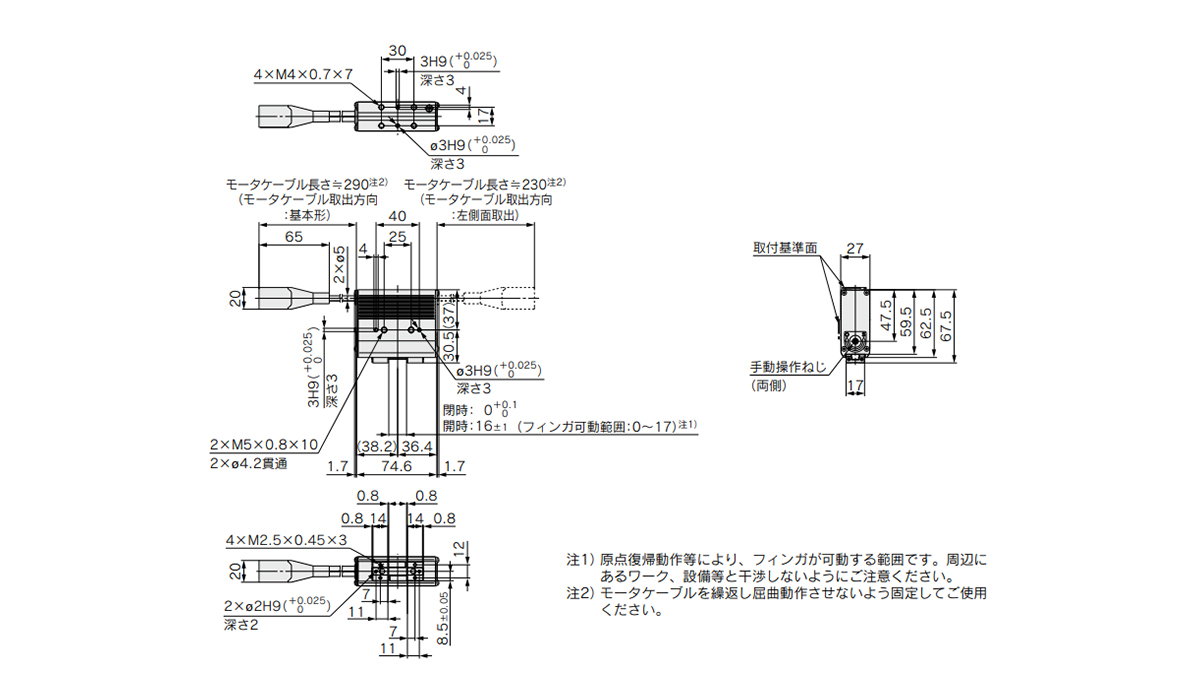
LEHF10K2-16 / basic dimensional drawing
LEHF10K2-32 / long stroke dimensional drawing
LEHF20K2-24 / basic dimensional drawing
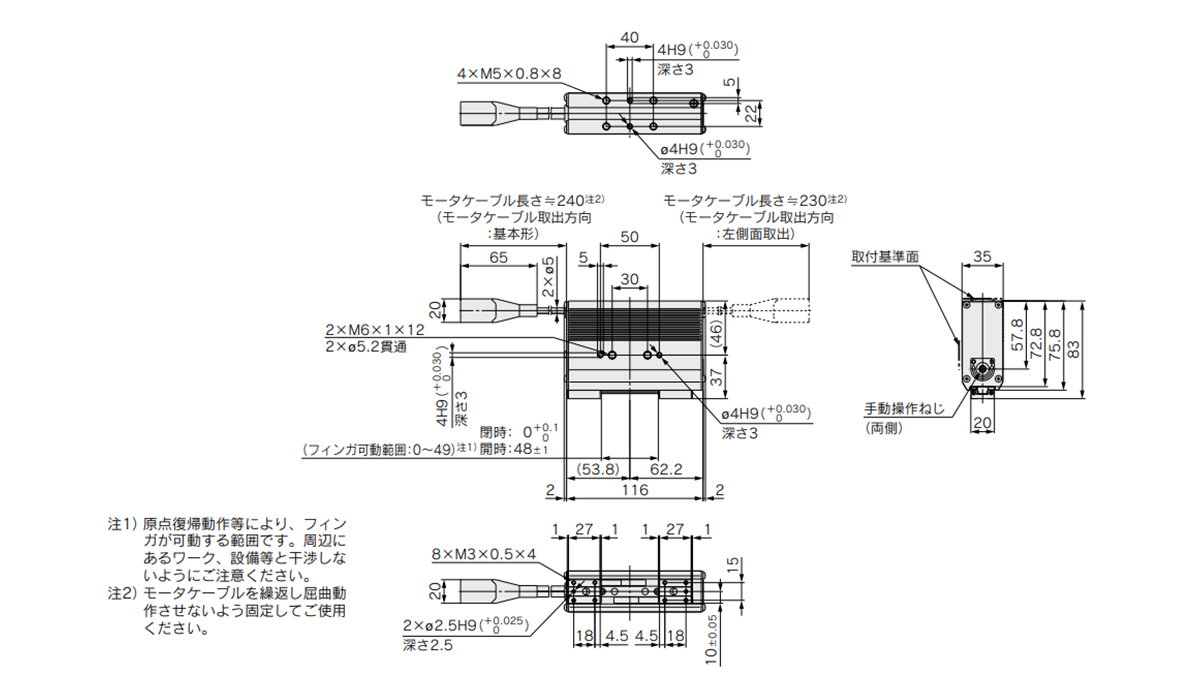
LEHF20K2-48 / long stroke dimensional drawing
Common Cautions
*1 Range within which the finger can move when it returns to origin. Make sure the workpiece mounted on the finger does not interfere with the workpieces and equipment around the finger.
*2 Secure the motor cable so that it will not be bent repeatedly.
Structure drawing
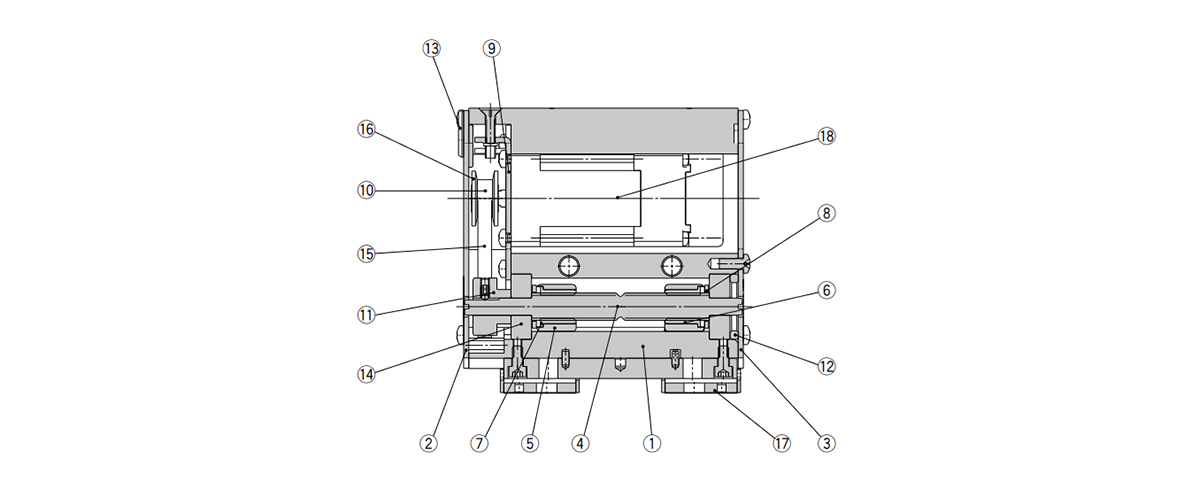
LEHF Series structure drawing
| No. | Description | Material | Note |
|---|---|---|---|
| 1 | Body | Aluminum alloy | Anodized |
| 2 | Side plate A | Aluminum alloy | Anodized |
| 3 | Side plate B | Aluminum alloy | Anodized |
| 4 | Slide shaft | Stainless steel | Heat treated + Specially treated |
| 5 | Slide bushing | Stainless steel | - |
| 6 | Slide nut | Stainless steel | Heat treated + Specially treated |
| 7 | Slide nut | Stainless steel | Heat treated + Specially treated |
| 8 | Fixed plate | Stainless steel | - |
| 9 | Motor plate | Carbon steel | - |
| 10 | Pulley A | Aluminum alloy | - |
| 11 | Pulley B | Aluminum alloy | - |
| 12 | Bearing stopper | Aluminum alloy | - |
| 13 | Rubber bushing | NBR | - |
| 14 | Bearing | - | - |
| 15 | Belt | - | - |
| 16 | Flange | - | - |
| 17 | Finger assembly | - | - |
| 18 | Step motor (servo 24 V DC) | - | - |
Mounting Method
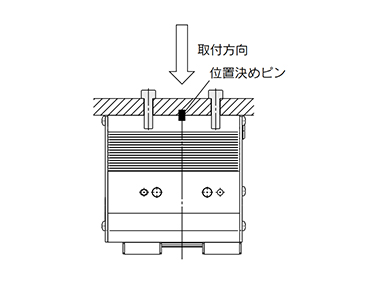
When using the thread on the body
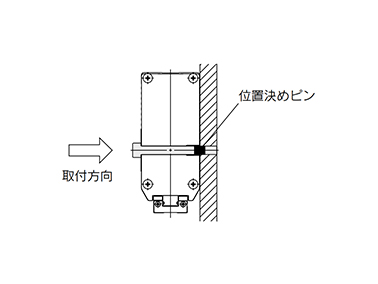
When using the thread on the mounting plate
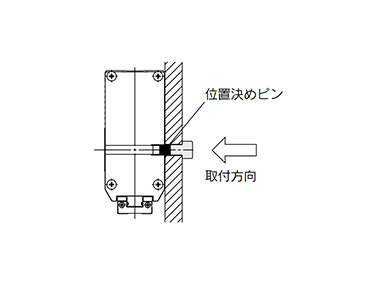
When using the thread on the back of the body
Precautions
- *The parameters of the stroke and the open/close speed are for both fingers.
- *The stroke and the open/close speed for one finger is 1/2 the set parameter.
- *When gripping a workpiece by the product, be sure to set to "Pushing."
- *Also, do not hit the workpiece with the finger and attachment during positioning or in the range of positioning. Otherwise, the lead screw can get caught and this may result in a malfunction. However, if the workpiece cannot be gripped when pushing (such as if the workpiece is a plastically deformed workpiece or rubber component, etc.), grip it when positioning giving consideration to the elastic force of the workpiece.
- *There is no effect on the backlash during pushing.
- *The return to origin is done by pushing. The finger position can be displaced by the effect of the backlash during positioning. This backlash displacement should be considered when setting the position.
- *See the manufacturer's catalog for product information other than the above.
- *Product images are representative images.
| Part Number |
|---|
| LEHF10K2-16-R8MJTD |
| Part Number | Price | Minimum Order Qty. | Volume Discount | Days to ShipSố ngày giao hàng | Dimensions when open (mm) | Maximum Gripping Force (Opening Side, Electric Type) (N) | Maximum Gripping Force (Closing Side, Electric Type) (N) | Size | Stroke (mm) | Motor cable entry direction | Actuator cable type | Actuator cable length | Controller / driver type | I/O cable length | Controller/driver mounting method | Communications plug |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
- | 1 Piece(s) | Quote | 16 | 7 | 7 | 10 | 16 | Entry on the right side | Robot cable | 8 m | CC-Link direct input type | None | DIN rail mounting | T-branch-type communication plug connector |
Loading...Tải…
Basic InformationThông tin cơ bản
| Type | Main Body(Electric Type) | Gripping Methods | Pinch, Parallel Type / Open, Parallel Type | Number of Fingers | 2 pcs. |
|---|---|---|---|---|---|
| Main Body Shape | Lateral Shape | Dimensions when closed(mm) | 0 | Environment, Applications | Standard |
| Additional Functions | With Linear Guide | Stroke Adjustment Mechanism | Open/Close Dual Adjustment |
Please check the type/dimensions/specifications of the part LEHF10K2-16-R8MJTD in the Electric Gripper, 2-Finger Type, LEHF Series series.Vui lòng kiểm tra kiểu/kích thước/thông số kỹ thuật của phần LEHF10K2-16-R8MJTD trong chuỗi Electric Gripper, 2-Finger Type, LEHF Series.
- The specifications and dimensions of some parts may not be fully covered. For exact details, refer toCác thông số kỹ thuật và kích thước của mã sản phẩm có thể không được bao phủ đầy đủ. Để biết chi tiết chính xác, hãy tham khảo manufacturer catalogsdanh mục nhà sản xuất ..
Products like this...
| Part Number |
|---|
| LEHF10K2-16-6PD |
| LEHF10K2-16-AN1 |
| LEHF10K2-16-R1 |
| LEHF10K2-16-RA |
| LEHF10K2-16-RA1P5D |
| LEHF10K2-16-RA6N1D |
| Part Number | Standard Unit Price | Minimum order quantity | Volume Discount | Days to ShipSố ngày giao hàng | Dimensions when open (mm) | Maximum Gripping Force (Opening Side, Electric Type) (N) | Maximum Gripping Force (Closing Side, Electric Type) (N) | Size | Stroke (mm) | Motor cable entry direction | Actuator cable type | Actuator cable length | Controller / driver type | I/O cable length | Controller/driver mounting method | Communications plug |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
- | 1 Piece(s) | Quote | 16 | 7 | 7 | 10 | 16 | Entry on the right side | None | None | PNP step data input type | None | DIN rail mounting | None | ||
- | 1 Piece(s) | Quote | 16 | 7 | 7 | 10 | 16 | Entry on the right side | None | None | NPN pulse input type | 1.5 m | Screw mounting | None | ||
- | 1 Piece(s) | Quote | 16 | 7 | 7 | 10 | 16 | Entry on the right side | Robot cable | None | None | 1.5 m | Screw mounting | None | ||
- | 1 Piece(s) | Quote | 16 | 7 | 7 | 10 | 16 | Entry on the right side | Robot cable | 10 m | None | None | Screw mounting | None | ||
- | 1 Piece(s) | Quote | 16 | 7 | 7 | 10 | 16 | Entry on the right side | Robot cable | 10 m | PNP programless type | 5 m | DIN rail mounting | None | ||
- | 1 Piece(s) | Quote | 16 | 7 | 7 | 10 | 16 | Entry on the right side | Robot cable | 10 m | NPN step data input type | 1.5 m | DIN rail mounting | None |



How can we improve?
How can we improve?
While we are not able to respond directly to comments submitted in this form, the information will be reviewed for future improvement.
Customer Privacy Policy
Thank you for your cooperation.
While we are not able to respond directly to comments submitted in this form, the information will be reviewed for future improvement.
Please use the inquiry form.
Customer Privacy Policy